Sponsor MeetingJan 27, 2017
Today we met with our two sponsors Professor Kong and Dr. Moore to understand the scope of the project. We have established that there are two components to this project.
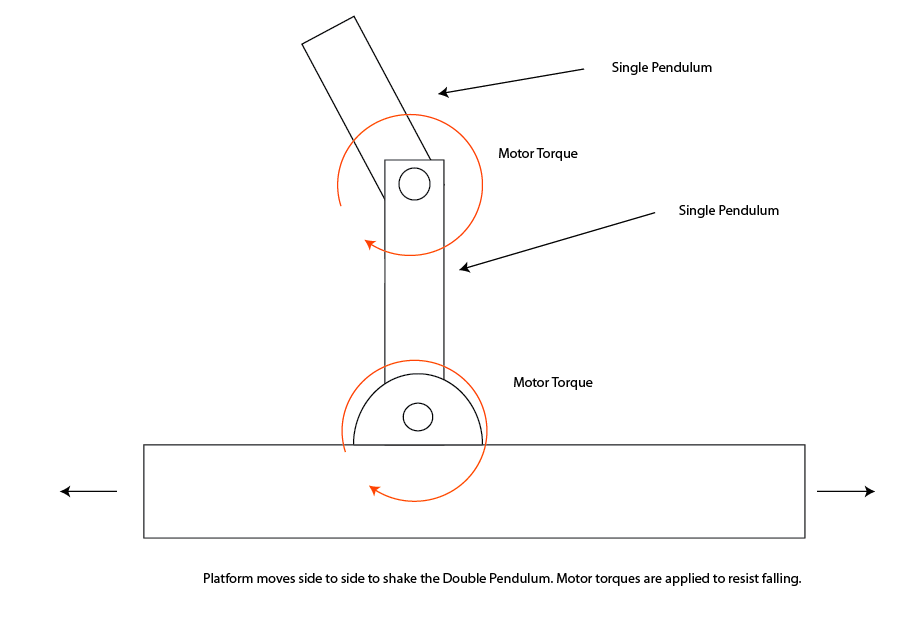
- Design an actuated double pendulum robot that can resist perturbations so that we can test controllers that have been derived from studying human balance.
- Create a demonstration unit for the UC Davis high school COSMOS program that can be used to demonstrate how control systems work in real life.
The 2nd requirement is the easier of the two and simply requires that we dumb down the interface so that high school students can play with different parameters and watch the robot attempt to balance itself during perturbations. The 1st requirement is the "fun" one where we will be testing different controller equations and seeing if these controllers will work in keeping the robot balanced.
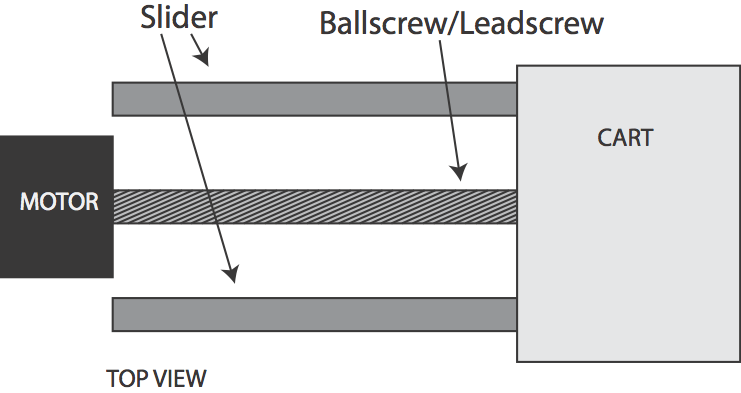
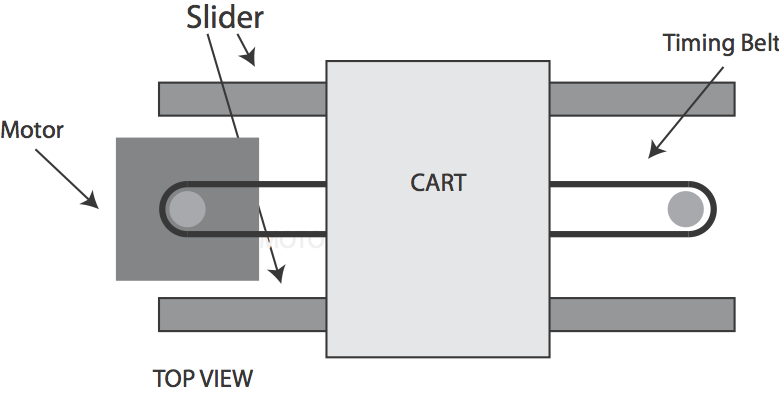
You may be aware of the double pendulum on a cart problem where the cart can swing up and balance the inverted double pendulum. https://www.youtube.com/watch?v=B6vr1x6KDaY. Ours will be different because instead of balancing our inverted pendulum with a cart we will be using the cart to perturb the pendulum and use the actuators at the pivot points to apply appropriate torques to hopefully keep the pendulum from falling. These actuators act like muscles in the ankles and hips of a human body. In theory models derived from perturbing humans should work on our model. (We'll see if that actually works.)